1.Onyesho la kwanza la roboti yenye akili ya hali ya juu.
Roboti mpya yenye akili M-10iD/10L itazinduliwa nchini China kwa mara ya kwanza!M-10iD/10L inaweza kubeba ubora wa 10kg, kurudia usahihi wa nafasi ±0.03mm, na radius inayoweza kufikiwa hadi 1636mm.Kwa utaratibu wa kipekee wa kuendesha gia, sifa za mwendo za hali ya juu zinaweza kufikiwa.Roboti hiyo hutumia muundo wa mkono uliojengwa ndani ya kebo, wakati huo huo, mkono usio na nguvu wa juu hutambua utendakazi wa mwendo wa kasi na usahihi wa juu wa roboti, na kisha kuboresha ufanisi wa uzalishaji wa mfumo wa roboti.

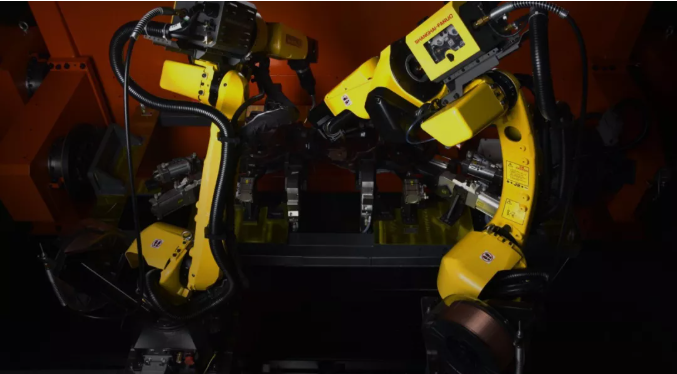
2.Ulehemu wa sehemu za chasisi ya magari.
Roboti ya kulehemu ya arc yenye mashine mbili-mbili na kiweka nafasi cha mhimili-tatu ili kufikia kulehemu kwa kushirikiana kwa mashine-mbili, kwa vituo viwili kunaonyesha tasnia ya chasi ya magari yenye ufanisi, suluhu za ubora wa juu za kulehemu.Mfumo wa maono wa iRVision 2D hupata kifaa cha kazi kiotomatiki na kwa usahihi, na hutambua upakiaji na upakuaji wa kiotomatiki wa roboti.Wakati wa mchakato wa kulehemu, nafasi inashirikiana na robot.Bila kujali nafasi na angle ya tochi ya kulehemu, kasi ya mstari wa tochi ya kulehemu kuhusiana na uso wa workpiece daima ni sawa na kasi ya kulehemu iliyowekwa.
3.Ulehemu wa bati.
Kwa kulenga kulehemu kwa bati kwenye kontena na tasnia ya gari yenye madhumuni maalum, uchomeleaji wa sahani kwa njia bora na wa akili unaweza kutekelezwa na teknolojia ya maono ya FANUC ya laser.Mshono wa kulehemu wa workpiece ya sahani ya bati iko na kuchunguzwa na teknolojia ya maono ya laser, ambayo hupunguza sana mahitaji ya usahihi wa nafasi ya workpiece.Wakati huo huo, inakabiliana na vipimo mbalimbali vya workpiece ya sahani ya bati bila kufundisha wimbo wa kulehemu, na inapunguza mahitaji ya uthabiti wa workpiece.

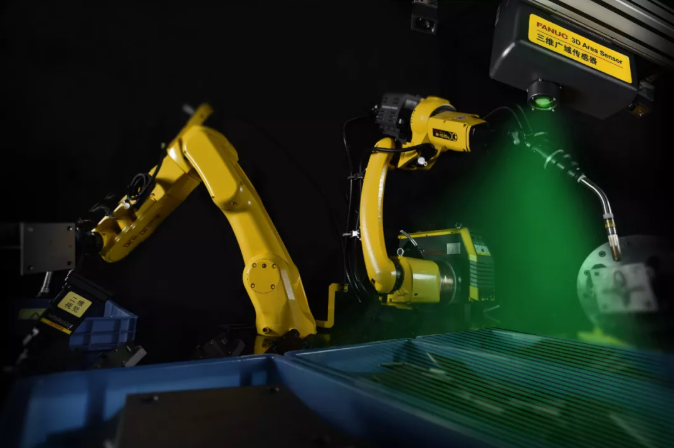
4.Kupanga kwa akili, kuweka na kulehemu.
Matumizi ya teknolojia ya maono na teknolojia ya akili ya kulehemu ya arc ili kukamilisha upangaji wa sehemu nyingi za kazi, upakiaji otomatiki na upakuaji, ili kufikia ufanisi wa juu na uchomaji wa hali ya juu.Roboti hupanga kiotomatiki na kupakia kiotomatiki na upakuaji wa vipimo mbalimbali vya sehemu nyingi za kazi kupitia sensor ya eneo pana ya 3DA ya pande tatu.Sensor ya eneo pana la pande tatu imeunganishwa sana na roboti, na mwalimu wa roboti anaweza kutazama na kusanidi mfumo wa maono moja kwa moja, ambayo ni rahisi sana kwa utatuzi na matengenezo ya mfumo wa maono.
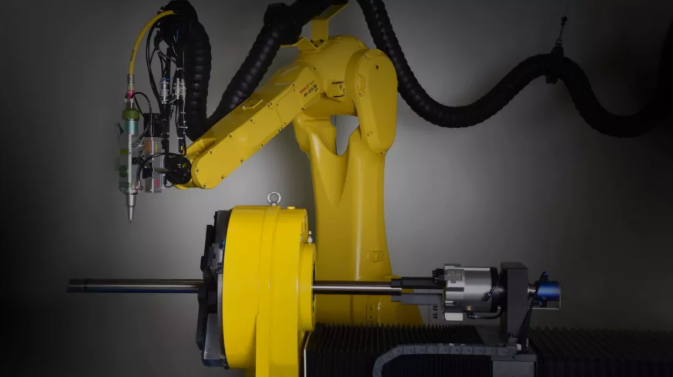
5.Kukata kwa laser ya fittings bomba.
FANUC italeta ufumbuzi wa ufanisi wa kukata laser kwa mabomba katika sekta ya vifaa.Kifurushi cha kazi cha kukata bomba kilichojengwa ndani ya mfumo kinaweza kutoa programu ya kukata moja kwa moja.Utaratibu wa kulisha unaendeshwa na injini ya servo ya FANUC, na roboti inaunganishwa nayo ili kutambua mstari wa kukatiza wa bomba, kufungua na kumaliza kukata uso.
Muda wa kutuma: Jul-19-2021